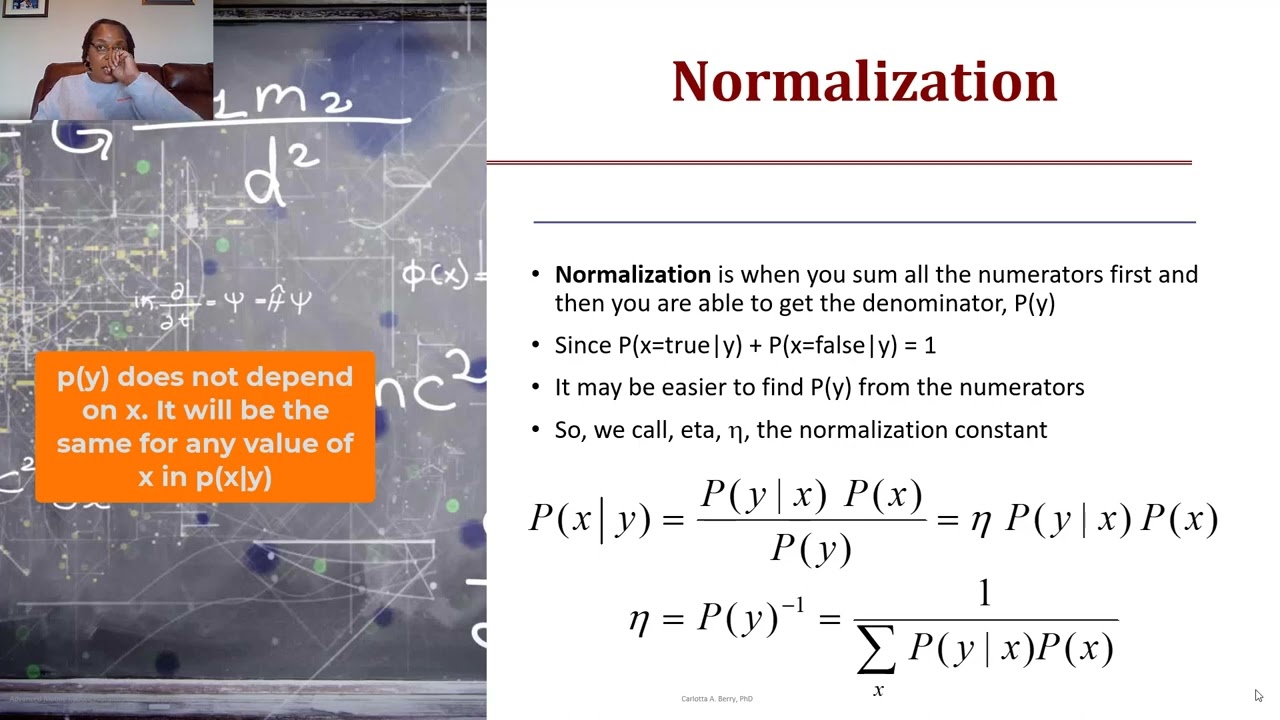
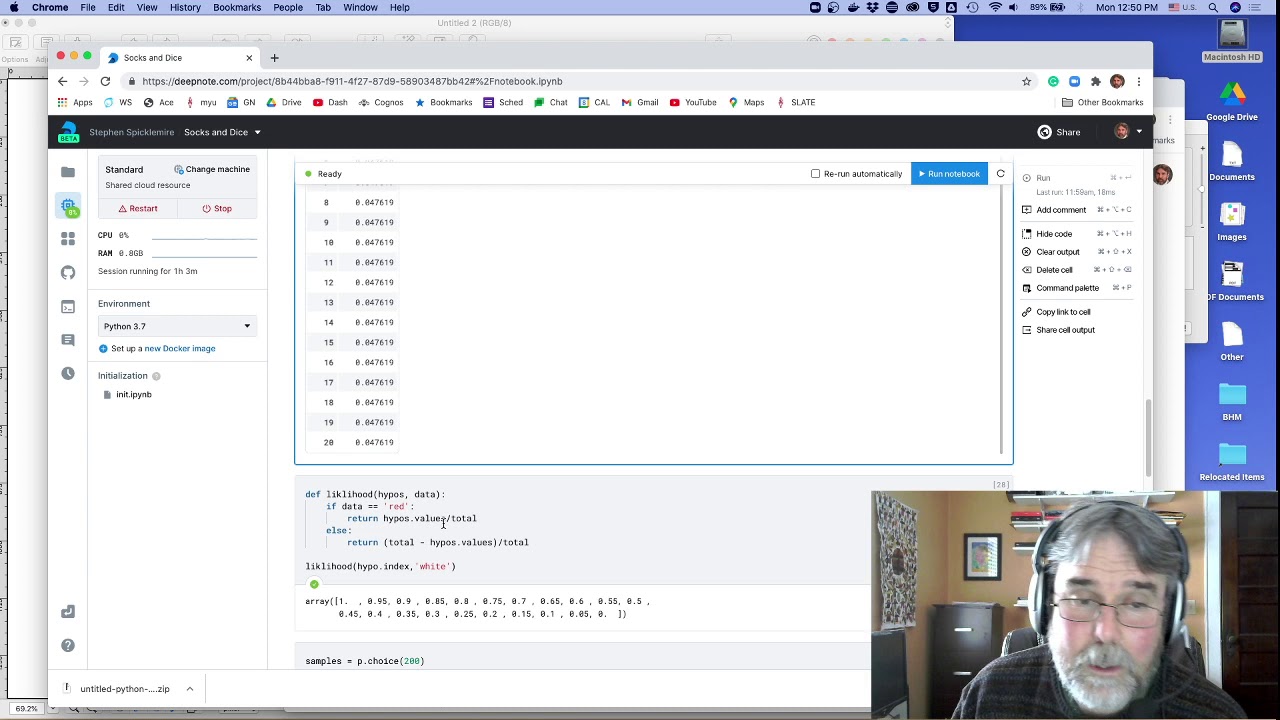
Advanced Mobile Robotics Lecture 2-2a: Recursive Bayesian Updating for State Estimation Carlotta A. Berry, PhD 12:40 2 years ago 853 Далее Скачать
Advanced Mobile Robotics: Lecture 2-1a - Probabilistic Robotics Carlotta A. Berry, PhD 12:20 2 years ago 472 Далее Скачать
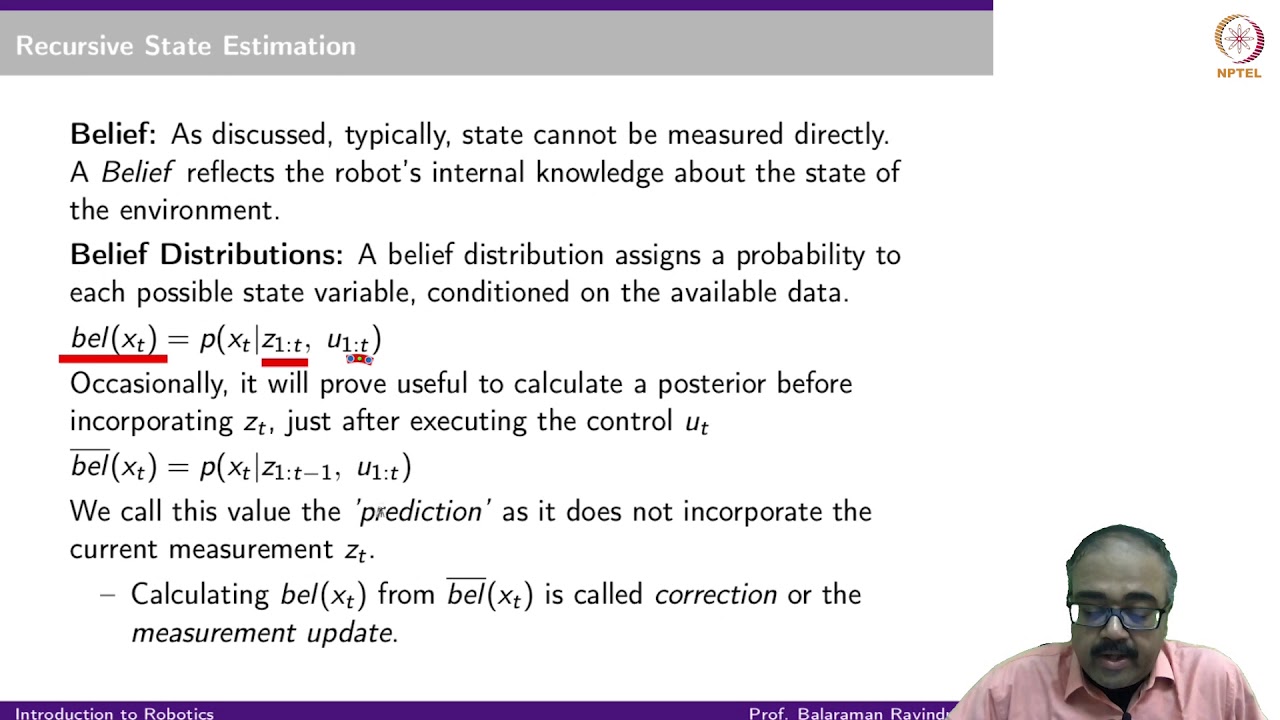
Lecture 7.3 - Recursive State Estimation: Bayes Filter Illustration. NPTEL-NOC IITM 30:03 3 years ago 5 421 Далее Скачать
Lecture 7.2 - Recursive State Estimation: Bayes Filter NPTEL-NOC IITM 29:04 3 years ago 6 480 Далее Скачать
Advanced Mobile Robotics: Lecture 2-1b - Probabilistic Robotics and Bayes Rule Carlotta A. Berry, PhD 7:44 2 years ago 440 Далее Скачать
Advanced Mobile Robotics: Lecture 5-1 - Discrete Bayes Filters Carlotta A. Berry, PhD 16:01 2 years ago 314 Далее Скачать
Bayesian updating of the statistical parameters and probability model for ice peak loads COST Action TU1402 18:24 6 years ago 79 Далее Скачать
Photogrammetry II - 11 - Bayes Filter and Models (2015/16) Cyrill Stachniss 1:14:30 8 years ago 3 943 Далее Скачать
Advanced Mobile Robotics: Lecture 7-1a - Kalman Filters for Localization Carlotta A. Berry, PhD 15:50 2 years ago 473 Далее Скачать
Advanced Mobile Robotics - Lecture 6-1b - Bayes Particle Filters (Monte Carlot Localization) Carlotta A. Berry, PhD 10:52 2 years ago 302 Далее Скачать
SLAM Course - 02 - Bayes Filter - Cyrill Stachniss Cyrill Stachniss 51:36 11 years ago 10 854 Далее Скачать
Lecture 11 Probability Review, Bayes Filters, Gaussians -- CS287-FA19 Advanced Robotics Pieter Abbeel 1:18:46 4 years ago 4 915 Далее Скачать
Day in My Life as a Quantum Computing Engineer! Anastasia Marchenkova 0:46 1 year ago 518 089 Далее Скачать
Advanced Mobile Robotics: Lecture 1-1: Course Introduction and Overview Carlotta A. Berry, PhD 1:34 2 years ago 733 Далее Скачать